

Hopcopter: Energieeffiziente Fortbewegung mit Federbein
Ein Quadcopter, unter dem ein Federbein zum Hüpfen angebracht ist, erreicht eine erhebliche Energieeinsparung bei der Fortbewegung.
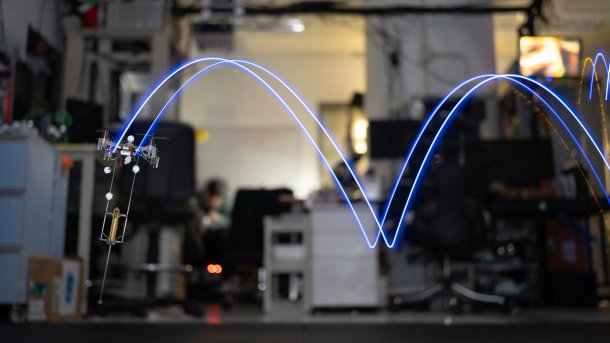
Der Hopcopter bewegt sich hüpfend vorwärts und benötigt dabei nur wenig Energie.
(Bild: Songnan Bai u. a.)
Chinesische Wissenschaftler der City University of Hong Kong und der Hong Kong University of Science and Technology haben einen einbeinigen hüpfenden Roboter mit der Bezeichnung "Hopcopter" entwickelt, der sich besonders energiesparend fortbewegt und dabei sogar mehr Nutzlast tragen kann. Der Roboter basiert auf einem Quadrokopter, der mit einem einzelnen Federbein ausgerüstet ist.
Die Forscher haben sich in ihrer Studie "An agile monopedal hopping quadcopter with synergistic hybrid locomotion", die in Science Robotics erschienen ist, auf zwei Schwerpunkte konzentriert: Wie können bei einem Flugroboter die Ausdauer und die Nutzlastkapazität zugleich erhöht werden? Auf diese zunächst komplex erscheinende Frage haben die Wissenschaftler eine einfache Antwort gefunden. Sie haben einem Quadrokopter ein einzelnes zentrales Federbein untergeschnallt, mit dem der Roboter zwischen den Fortbewegungsarten Hüpfen und Fliegen nahtlos wechseln kann.
Das Federbein besteht aus zwei starren Teilen, die durch Gummibänder miteinander verbunden sind. Federt es ein, gibt es die gespeicherte Energie wieder durch Entfaltung ab. Um die Hüpfhöhe aufrechtzuerhalten, muss der Quadrokopter wenig Energie aufwenden und seine Rotoren nur kurz betätigen, um wieder auf die gleiche Höhe zu kommen. Nach Angaben der Forscher kann der für die Studie verwendete Crazyflie-Microcopter, der nur 35 Gramm wiegt, etwa 20,7 Minuten lang in einer Höhe zwischen 0,6 und 1,6 Meter herumhüpfen. Ohne das Teleskopbein kann sich der Roboter lediglich 6,3 Minuten in der Luft halten. Die Hüpfmethode als Fortbewegung ist also deutlich energieeffizienter.
Auf zusätzliche Sensoren, die den Roboter stabil halten, haben die Forscher verzichtet. Stattdessen verwenden sie stabilisierende Flossen, die aerodynamisch wirken und ein kontinuierliches Hüpfen zulassen, ohne dass der Roboter umzukippen droht.
Die Richtungsänderung erfolgt durch die Schubsteuerung der Rotoren oder der Roboter nutzt schräge Oberflächen, um einen sofortigen Richtungswechsel einzuleiten. Zusätzlich kann er in der Luft Purzelbäume schlagen.
Mit Nutzlast effizient fortbewegen
Die Wissenschaftler haben außerdem Nutzlasten an den Hopcopter befestigt. Dabei stellten sie fest, dass er deutlich höhere Lasten bewegen konnte, da er sie nicht kontinuierlich in der Luft halten musste.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmmung wird hier ein externes Video (Kaltura Inc.) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (Kaltura Inc.) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Das Federbein hat aber noch weitere Vorteile: Es dient als eine Art Stoßdämpfer, sodass der Roboter sich auch auf unebenem Untergrund fortbewegen oder sich mit ihm von Wänden oder anderen Strukturen abstoßen kann, um so Schäden zu vermeiden.
Die Forscher sehen das Einsatzgebiet ihres Hopcopters dort, wo weite Strecken mit wenig Energieaufwand zurückgelegt werden sollen. Eine mögliche Anwendung ist die Überwachung von Wildtieren. Der Roboter könnte in den Ästen von Bäumen herumhüpfen und dabei Tiere beobachten. Auch sehen die Wissenschaftler ihn im Einsatz in Katastrophengebieten, um etwa Überlebende aufzuspüren oder als Überwachungsroboter in der Landwirtschaft. Dort könnte er am Boden von Pflanze zu Pflanze springen und den Feuchtigkeitsgehalt des Bodens kontrollieren.
Die Forscher sagen, dass es möglich sei, nahezu jede Quadkopter-Plattform so anzupassen, dass sie mit einem Federbein und Stabilisatoren ausgerüstet werden kann.

(olb)